
10-新城金矿井下有轨运输智能道岔系统的设计与应用
井下有轨运输智能道岔系统的应用
随着新城金矿深部开拓工程的推进,有轨运输系统因其污染小、生产量大、运距不受限制、经济性好、调度灵活等优点而广泛应用。考虑到生产效率、矿毛运输、设备维修等因素,运输系统中支线、复线、环形车场等复杂运输形式被越来越多的应用于实际生产,传统的单开道岔的转辙机构效率低下、故障率高的问题逐渐暴露出来,限制有轨运输系统的运输效率。我矿自主开发智能道岔系统摒弃传统人工扳道模式,采用可靠性较高的液压模式,利用多种触发模式提升有轨运输效率,确保井下高效生产。
一、研究背景
1、-930中段有轨运输系统全长约2500m,采用30kg/m钢轨,环形运输与复线运输相结合。与该中段盲斜井提升系统、溜破系统、粉矿回收井等系统相连,道岔较多,合计15处。道岔转辙机构使用人工拨道器。人工扳道耗时较长且难以保障辙尖动作到位,易造成电机车、矿车脱轨。
2、有轨运输系统采用CJY10-6/250电机车、YCC2-6单侧曲轨侧卸式矿车。目前为3台电机车运输,每台电机车挂载12台矿车,三班作业。
二、研究内容
1、基本功能
(1)适用范围
本装置适用于井底车场及运输巷道中道岔的,集中控制以及单独控制。大幅度提高长距离有轨运输系统运输效率。
(2)基本功能
当机车运行至道岔前,由司机控制无线发射装置,发出指令信号,同时,控制器接收到发送器(或按钮)信号后,控制执行机构(油缸)动作,扳动道岔。当道岔扳到位时,显示单元显示道岔位置,机车行进通过。
2、结构
智能道岔系统的结构,主要有:控制单元,发射单元,接收单元,指示单元及动力单元组成。
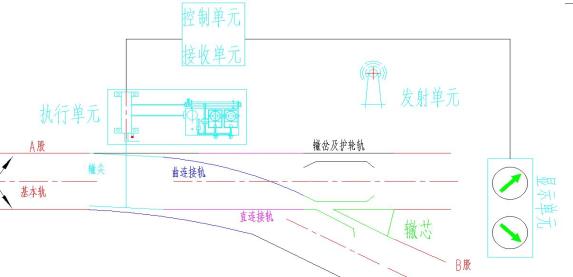
3、工作原理
本系统建立司机与控制器的双向通讯,系统设计使司机除了发送控制命令外,还能实时的获得道岔状态信息,当电机车接近道岔时,道岔状态通过接近开关检测到道岔状态,且通过硬接线连接方式,在显示单元上通过LED显示状态。司机根据显示单元上的状态决定是否需要扳动道岔。如果需要扳动道岔,则司机通过发射单元按键,发出信号,当控制器接收到发射单元(或按钮)信号后,接收单元接收信号动作,至其24V接触器动作,控制液压动力单元道岔方向阀动作扳动道岔。 当道岔扳到位时,LED显示器单元显示道岔位置。系统总体结构图如下:
显示功能:显示器能正确显示道岔当前位置。
提示功能:当道岔两边都不到位时,显示器不显示道岔位置。
发送器遥控距离:0~100m
道岔动作灵敏度高,动作时间:≤3s。
本系统工作形式:遥控司机控制、就地控制、矿毛分离自动控制。
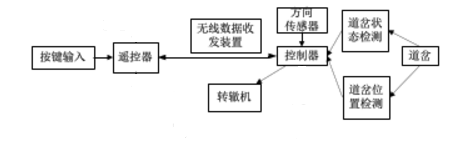
系统总体结构图
4、矿、毛自动道岔控制设计
当电机车到达道岔前的方向感应传感器时,方向传感器自动判别电机车运行方向(注:矿石、毛石电机车为固定电机车且触发传感器位置不同),然后向前方道岔发出方向信号,根据矿石、毛石电机车矿种不同,自动将道岔打到相应溜井方向,当道岔未到位时,安装在油缸两侧的位置检测开关未动作,显示单元不显示方向信号,机车停止。
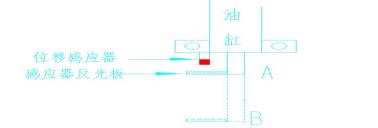
油缸执行到位示意图
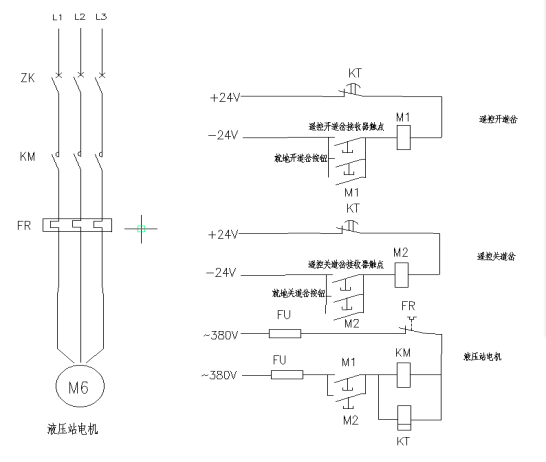
电控原理图
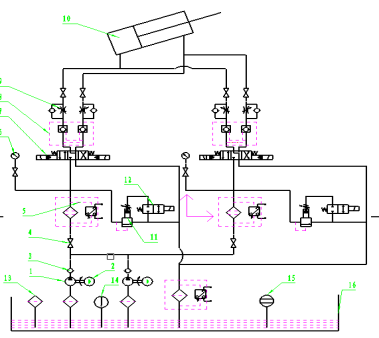
液压原理图
5、实验
该系统在遥控方式下经过现场测试,实验数据见表。通过逐渐扩大遥控器与控制器的距离,观察并记录对执行装置控制的成功次数,从而得出系统在不同测试距离的成功率,实验结果表明:在100米范围内,控制器能够对遥控器发送的控制命令接收并对执行装置做出精准控制。
测试距离/m | 测试次数 | 成功次数 | 成功率/% |
20 | 50 | 50 | 100 |
60 | 50 | 50 | 100 |
80 | 50 | 50 | 100 |
100 | 50 | 50 | 100 |
三、主要创新点
1、转辙机构的选择。
其中动力部分可选用液压、气动、电动三种。电动转辙机构结构相对复杂,不适合井下复杂环境。气动转辙机构需要使用高压风,且高压风中不能有水。综合考虑选择液压转辙机构,能够适应井下复杂条件且故障率低、动作可靠。
2、接收单元采用抗干扰能力强的单片机进行信号采集识别判断,无线遥控能在远距离对道岔进行准确遥控确保机车的安全行驶;
3、接收线路均采用线缆屏蔽,系统抗干扰能力强;
4、显示器直观地指示出道岔目前位置司机可根据机车 目标方向在远方遥控改变道岔开启位置;
5、触发形式多种多样,可根据生产情况使用遥控装置随意扳动道岔,也可增设接近触发形式,固定车辆精准倒矿,实现矿毛分离。
